ドローン自律航行
TS航法による
UAVの自律飛行
社会資本空間字デジタル化研究室
背景
- ■ダム堤体のコンクリート表面の調査・点検は,高所作業の安全性、広範囲調査による長時間作業、点検技術者の力量により評価が異なるため、正確に劣化情報の位置、形状、数量等の経年変化を把握できない等の課題がある。
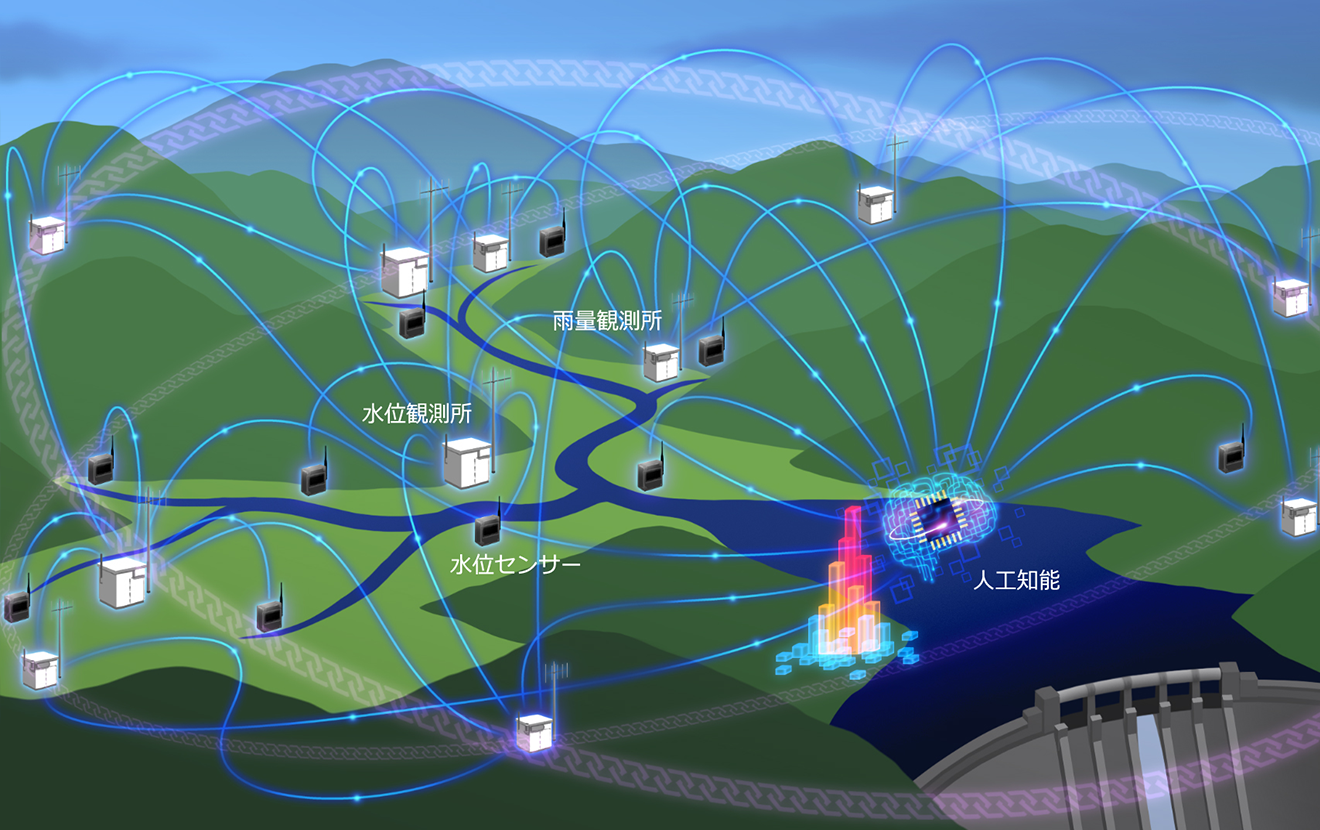
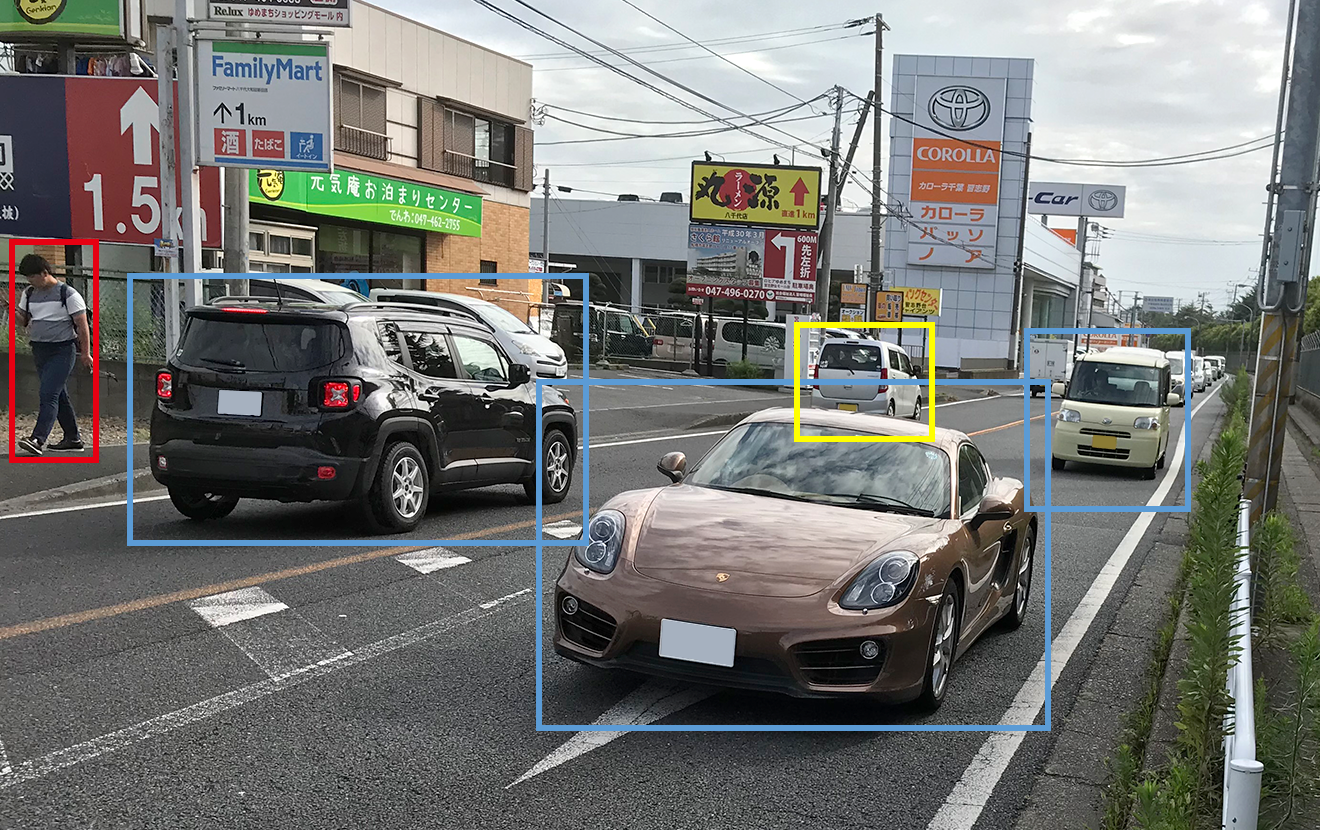
- ■ドローンで撮影した画像をAIを用いて解析する技術が開発されているが、解析画像の画角や画質の確保がパイロットの操縦技術に影響されるという課題もある。
成果
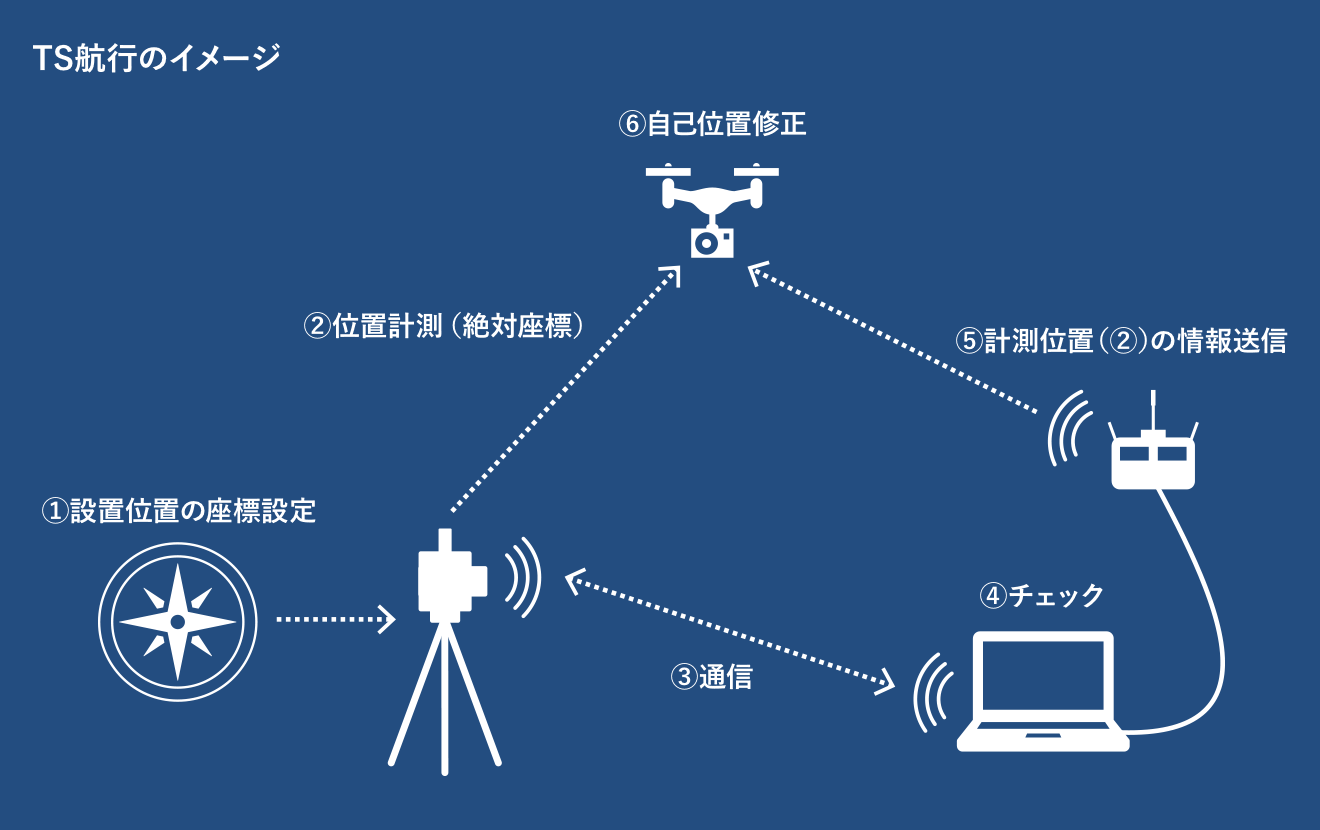
- ■TS航法は、UAVの飛行位置(緯度,経度,標高)を自動追尾式トータルステーションで計測し、その計測情報をUAVに送信することで、UAVがWPとの乖離を自己修正して所定ルートを自律飛行する仕組みである。
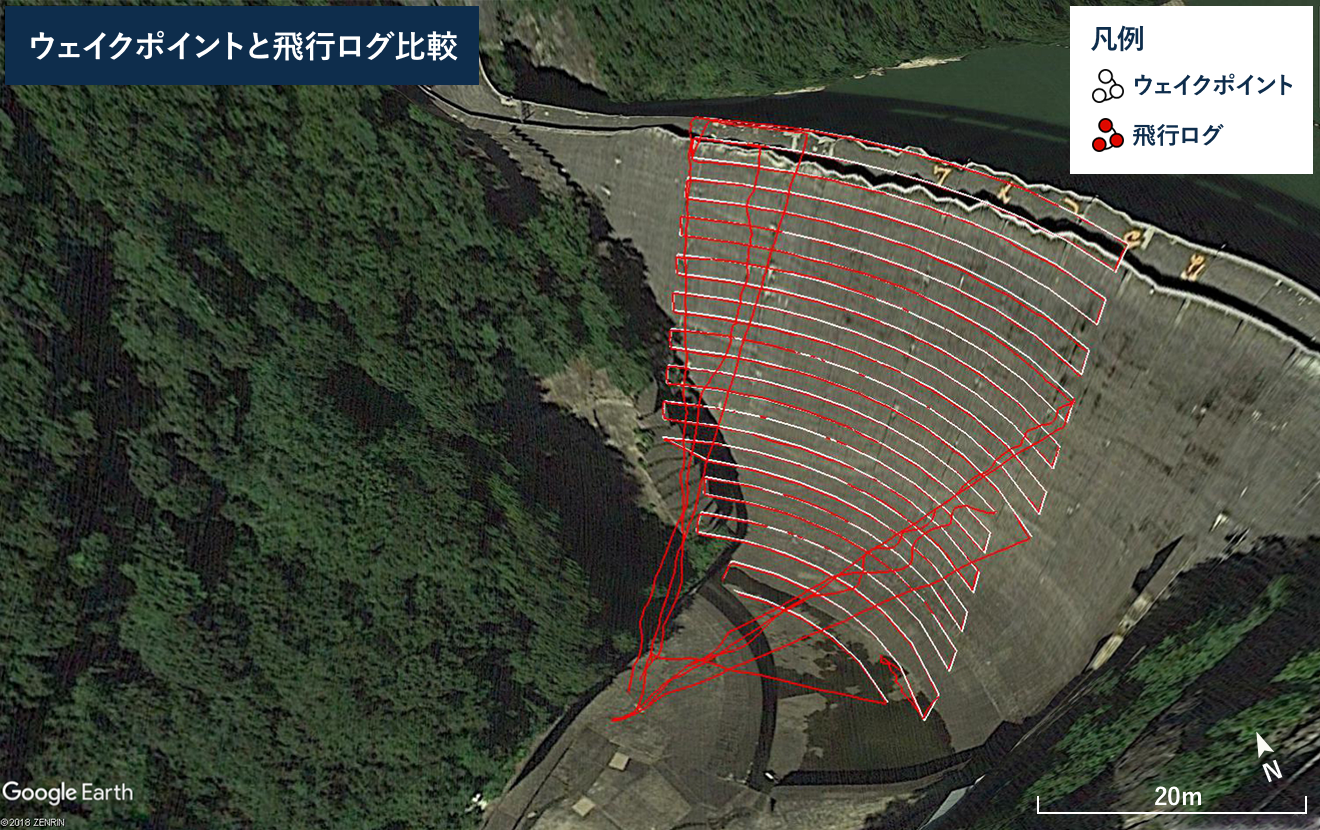
- ■TS航法により、乖離距離0.50m以内が全体の90%を占める等、安定した自律航行を実現できている。
- ■撮影画像は約2mm/pixelの解像度で鮮明な画像撮影が可能である。Key Words:UAV, ドローン, 自律航行 , 非GPS, TS航法
開発
領域
- ■非GPS環境下における自律航行としてのTS航法
- ■飛行ルート(Way Point)の自動設定
- ■TSによる写真撮影座標の計測
-
- 2022.09.16論文発表
- 令和4年度土木学会全国大会第77回年次学術講演会で「画像認識AIを用いたリップラップ材点検手法の適用性検証」を発表

-
- 2022.09.16論文発表
- 令和4年度土木学会全国大会第77回年次学術講演会で「画像認識AIを用いたロックフィルダム堤体のリップラップ材点検手法の提案」を発表
-
- 2022.06.17論文発表
- 人工知能学会第36回全国大会で「ロックフィルダムの堤体点検への画像認識AIの適用」を発表
-
- 2020.11.20論文発表
- 令和2年度のAI・データサイエンスシンポジウムで「 UAVの自律航行と空撮画像を活用したダム堤体点検の効率化・高度化に関する研究」を発表
-
- 2020.09.23論文発表
- 令和2年度建設コンサルタント業務研究発表会で「ダム堤体画像データ取得の再現性向上を目指したUAVの自律飛行」を発表
-
- 2019.11.23論文発表
- 計測自動制御学会中国支部学術講演会で「ダムサイトにおける自動追尾式トータルステーションを利用したUAVの自律飛行実験」を発表
-
- 2019.10.09論文発表
- 第19回建設ロボットシンポジウムで「非GPS環境下におけるドローンの自立航行」を発表