八千代エンジニヤリング株式会社
Menu
Menu

2020年09月17日
この度、弊社は日立トリプルウィン株式会社(代表取締役・取締役社長:相島正美、本社:東京都港区)、空撮サービス株式会社(代表取締役社長:山本哲男、本社:東京都港区)、株式会社ケイ・パックス(代表取締役:河内義彦、本社:千葉県佐倉市)と共同で、新サービス「DamLook(ダムルック)」を開発いたしました。
本サービスは、ダム点検・診断ノウハウとUAV操縦および機体制御技術を結集し、UAVの自律航行でダム堤体の空撮作業を大きく効率化させることで、画像データの品質と取得再現性を向上させることが可能です。

【取り組み背景】
通常、GPS測位情報は山間域の谷間では衛星補足数が少なかったり、堤体のような高い構造物付近ではマルチパスが発生したりするため精度が低く、無人航空機(UAV)はGPS測位情報を利用した自律飛行ができません。そのため、パイロットはUAVのGPSの位置および姿勢制御が効かない中、手動操縦で堤体に近接しUAVに搭載したデジタルカメラで堤体空撮作業を行っていました。
その結果、パイロットの経験や技術に左右された飛行により空撮された画像は、不均質や不鮮明であったり、撮影漏れが発生していたり、AI(人工知能)による点検・診断解析の解析精度に影響を与える等品質面の課題がありました。また、パイロットへの負荷も大きく、UAVは生産性向上のキーテクノロジーの一つでありながら効率化、省力化が図れていないことも課題でした。
【DamLookの特徴】
このような課題を踏まえ、今回開発した「DamLook(ダムルック)」は4つの特徴で、ダム堤体点検・診断、管理のための堤体空撮作業の効率性および画像データの品質と取得再現性を大幅に向上させることを実現しています。
①トータルステーション(TS)を活用したUAVの自律航法をダムに適用
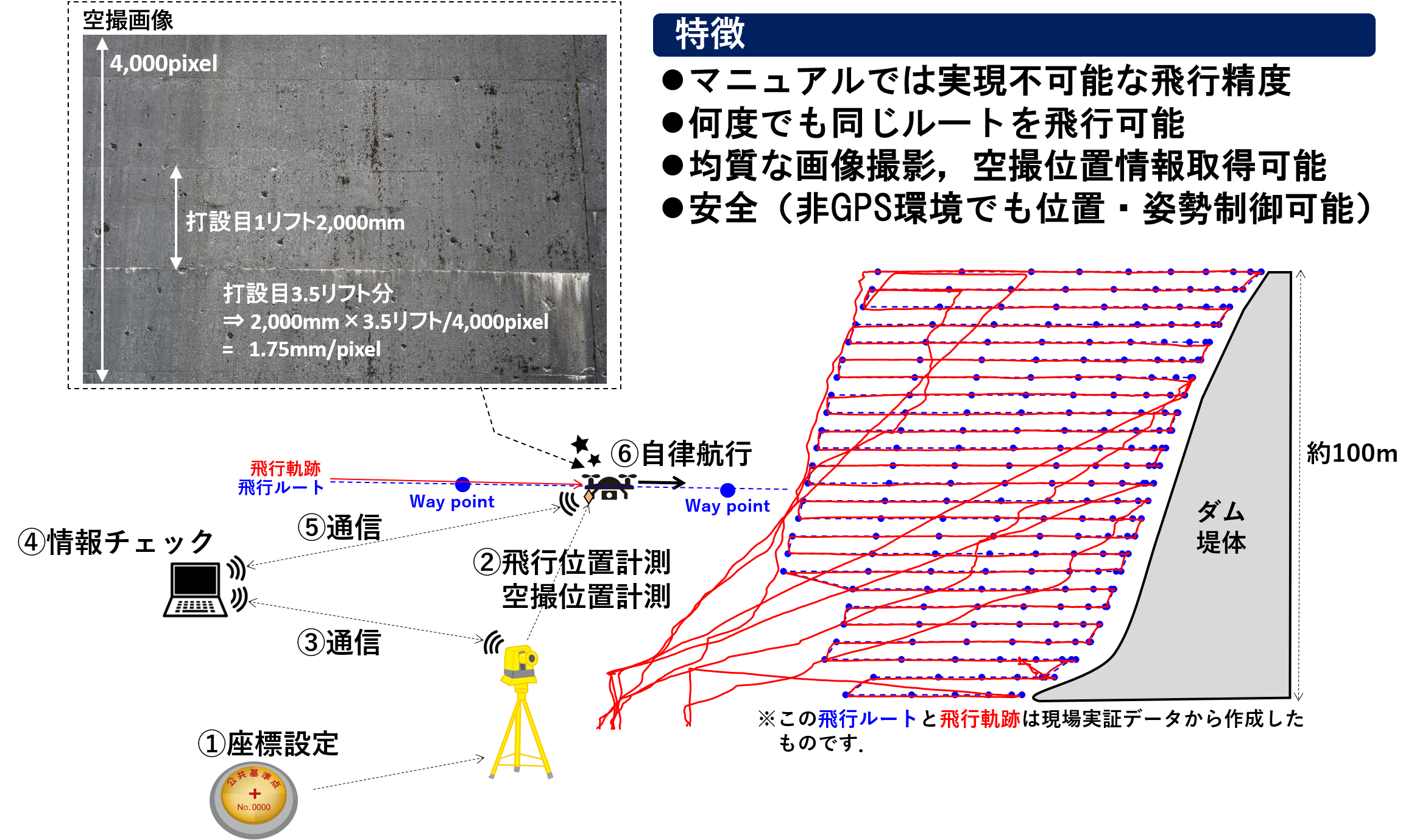
TSを活用したUAVの自律飛行は、汎用機体を用いると飛行高度や制御の制限があり活用機会が限定されていました。そこで、ダムのような大規模構造物に適用させるために現場実証と改良を重ね、手動操縦では実現できない飛行精度と安全性を兼ね備えたダム堤体周りのUAVの自律航行を実現させました。また、TSを活用することで絶対座標で飛行管理が行えるため、測量成果との相性が良く、ダム管理にも適しています。
②堤体から一定距離を確保した自律飛行のルート作成が可能
一般的なパイロットソフトではダム堤体の三次元地形形状が反映されていないことが多く、細かい自律飛行のルート設定はできません。そこで、TSで追尾したUAVは手動操縦でも位置および姿勢制御が可能となる点を利用し、その安定した飛行の軌跡からルートを作成する機能を実装しました。これにより、一度本サービスで飛行させることで、次回以降の同じ場所を繰り返し飛行することが可能となり、規則性向上と撮影抜け防止を図ることが可能となります。
③均質かつ鮮明な高解像度の空撮が可能
堤体との距離を一定に保った飛行ルートを自律航行することで飛行中の機体は安定し、堤体全体を均質で鮮明に高解像度で空撮することを実現しています。均質で鮮明な高解像度の画像データは、AIによる点検・診断解析でも有用になります。
④非GPS環境下での飛行でも撮影画像にジオタグ情報を付加することが可能
TSによるUAVの自動追尾は空撮位置の計測も可能であり、これにより三次元モデリングソフトウェアによる三次元復元処理の精度が向上します。
■本サービスのイメージ
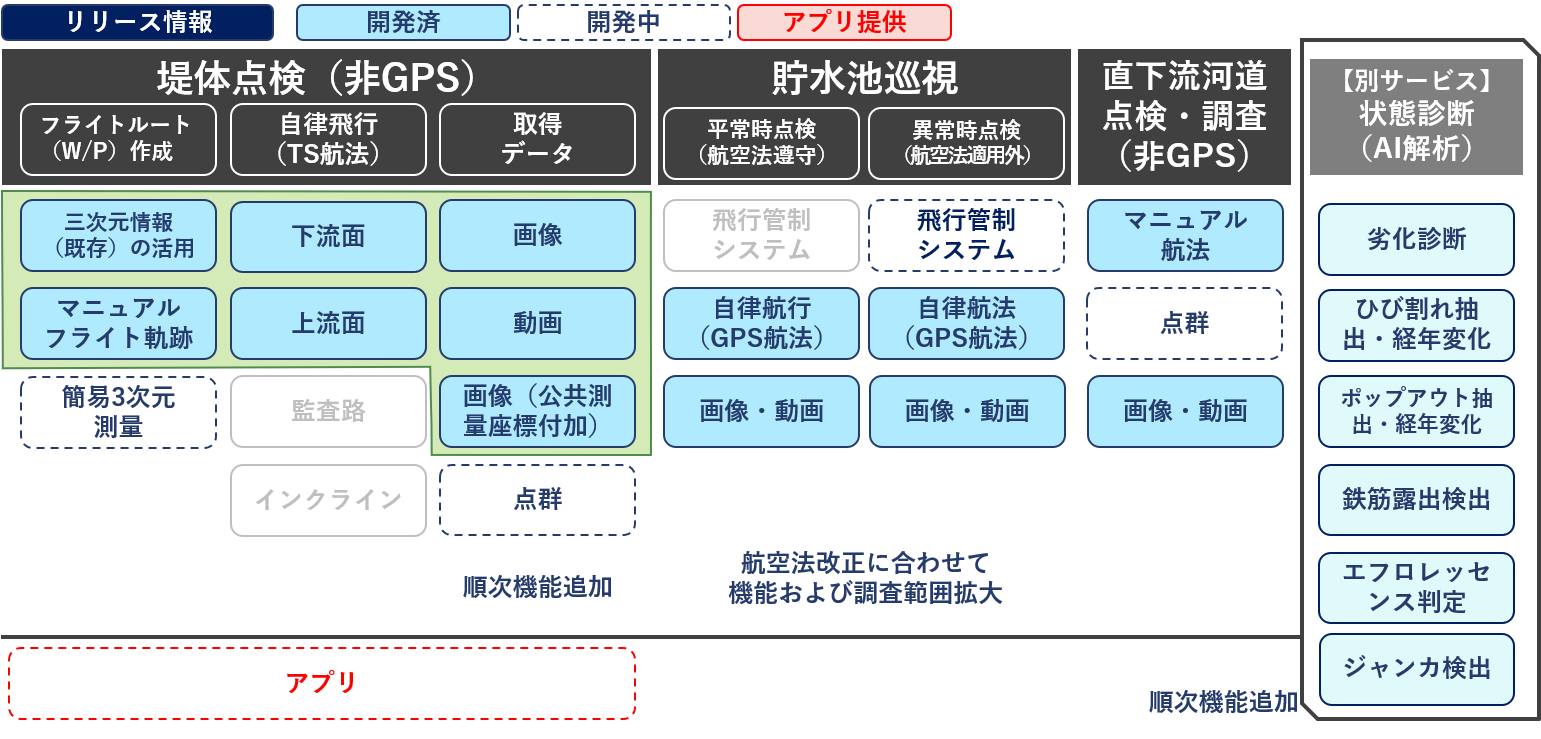
なお、今回新たに開発した「DamLook(ダムルック)」は、まずは基本機能のサービス提供から開始し、今後、順次機能追加を行っていきます。
また、撮影画像は、弊社のAIを活用して点検・診断、管理までトータルでサポートすることも可能です。
■機能リリース状況
【本サービスの問い合わせ先】
八千代エンジニヤリング株式会社 技術創発研究所 菅原、石井、小篠
E-mail:riips-digitalization@yachiyo-eng.co.jp 、TEL:03-5822-6844